激光SLAM(Simultaneous Localization and Mapping)和视觉SLAM是现代机器人导航和定位领域的两种重要技术。它们都旨在让机器人能够在未知环境中实现实时的自主导航和建图,但它们的工作原理和应用略有不同。
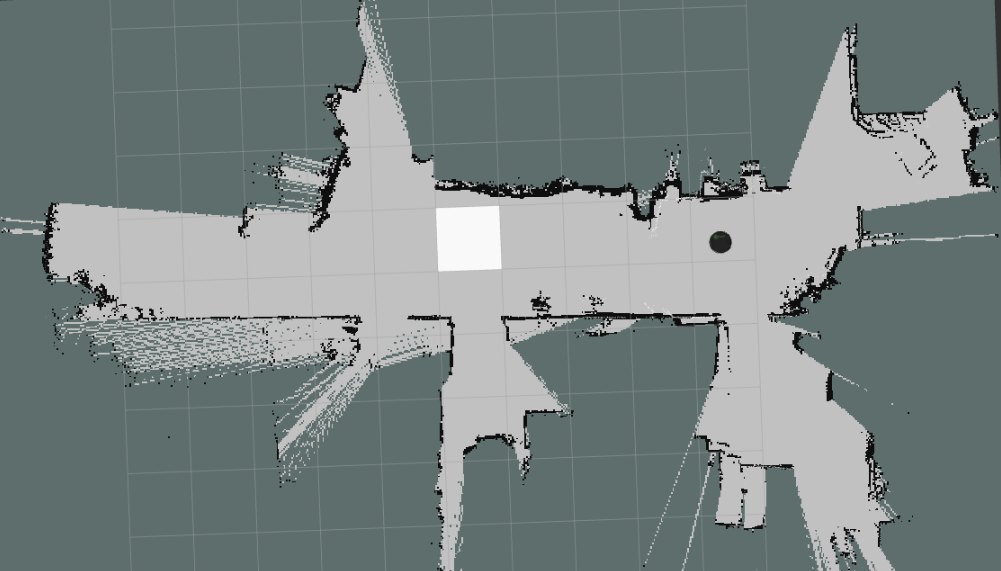
激光SLAM利用激光雷达传感器来感知周围环境。激光雷达发射激光束并测量它们与障碍物的反射时间,从而得出环境的几何结构。机器人根据激光雷达数据和之前建立的地图进行定位,并同时更新地图。激光SLAM的优点是精度高,能够提供准确的地图和定位信息。它在室内环境和封闭空间中表现出色,并且对于避障和建图任务非常有效。

激光SLAM(Simultaneous Localization and Mapping)和视觉SLAM是现代机器人导航和定位领域的两种重要技术。它们都旨在让机器人能够在未知环境中实现实时的自主导航和建图,但它们的工作原理和应用略有不同。
激光SLAM利用激光雷达传感器来感知周围环境。激光雷达发射激光束并测量它们与障碍物的反射时间,从而得出环境的几何结构。机器人根据激光雷达数据和之前建立的地图进行定位,并同时更新地图。激光SLAM的优点是精度高,能够提供准确的地图和定位信息。它在室内环境和封闭空间中表现出色,并且对于避障和建图任务非常有效。
视觉SLAM则依靠相机来感知环境并进行定位和建图。通过不断采集相机图像,并对图像进行特征提取和匹配,机器人可以计算出自己在环境中的位置和方向。相比于激光SLAM,视觉SLAM的优势是相机较为普遍和便宜,使其更具成本效益。此外,视觉SLAM在室外环境中的表现也相对更好,因为激光在户外环境中可能受到天气、光照和遮挡等因素的干扰。
尽管激光SLAM和视觉SLAM有各自的优势,但也存在一些区别。首先,激光SLAM提供的地图通常是准确而详细的,而视觉SLAM的地图可能会存在一些模糊或不完整的地方。其次,视觉SLAM对于光照条件和纹理丰富性更为敏感,相机的稳定性和环境的光照条件都会对其性能产生影响。此外,激光SLAM更适用于封闭空间和室内环境,而视觉SLAM更适用于户外环境和大范围的建图任务。

总结来说,激光SLAM和视觉SLAM是机器人导航和定位领域的两种重要技术。激光SLAM以激光雷达为基础,具有精确性和避障能力强的特点;而视觉SLAM则以相机为基础,具有成本效益和适应性强的特点。根据具体的应用场景和需求,选择适合的SLAM技术可以使机器人能够更好地实现自主导航和建图。
苏州华天视航智能装备技术有限公司是一家专业研发生产AGV的高新技术企业,集AGV小车和AGVS中央控制系统设计开发、生产制造、销售服务于一体,专业为客户制定无人搬运解决方案,提供AGV小车及配套AGVS中央控制系统,对接MES/ERP/WMS等生产管理系统及仓储管理系统,帮助客户实现生产与仓储自动搬运建设和改造。 AGV订购热线:0512-57823855
客服QQ:2180057338







